Nelle auto moderne molte spie non dipendono da un singolo sensore, ma da come le centraline si scambiano informazioni. Il CAN bus è la rete che tiene in contatto motore, ABS, airbag, quadro strumenti e gateway, quindi capirne il ruolo aiuta a leggere meglio un guasto e a evitare diagnosi affrettate. Qui spiego in modo pratico come funziona, perché si rompe, come si riflette sulle spie e quali controlli hanno davvero senso.
Le idee chiave da portare con te
- Il CAN è una rete di comunicazione tra centraline, non un componente singolo del motore.
- Una spia spesso segnala dati mancanti, incoerenti o fuori tempo, non per forza un guasto meccanico.
- In molte reti ad alta velocità, a impianto spento, circa 60 ohm tra CAN-H e CAN-L è un indizio utile, non una prova assoluta.
- Il gateway centralizza e smista i messaggi tra i diversi domini dell’auto.
- Prima di sostituire una ECU, conviene controllare alimentazione, masse, cablaggio e codici DTC.
Che cosa fa davvero il CAN bus in un’auto
Io lo leggo così: il CAN non serve a trasferire enormi quantità di dati, ma a far arrivare i messaggi giusti al momento giusto. Ogni centralina, cioè ogni ECU, è un nodo della rete e trasmette pacchetti brevi su una coppia di fili intrecciati, di solito chiamati CAN-H e CAN-L; la trasmissione differenziale aiuta a resistere ai disturbi elettrici tipici dell’ambiente automotive. CAN in Automation ricorda che il punto forte del sistema è l’arbitraggio non distruttivo: se più nodi parlano insieme, passa il messaggio con priorità più alta senza far collassare la rete.
Per questo il CAN è perfetto per funzioni di controllo, telemetria interna e diagnostica, meno per i grandi flussi dati che oggi viaggiano su Ethernet. In pratica, il bus non “gestisce” le spie da solo: mette in relazione le informazioni che poi le centraline usano per decidere cosa mostrare al conducente. Ed è proprio questa logica a spiegare perché una spia può accendersi anche quando il componente interessato, in apparenza, continua a funzionare.
Come si collegano centraline, gateway e quadro strumenti
Nelle architetture attuali il gateway è il nodo che mette in relazione reti diverse e smista i dati tra i domini dell’auto. Bosch Mobility lo descrive come il punto centrale di comunicazione fra le varie reti di bordo e l’esterno, e in pratica questo significa che motore, cambio, ABS, climatizzazione e quadro strumenti non lavorano come blocchi isolati. Una richiesta diagnostica entra dal connettore di diagnosi, passa spesso dal gateway e arriva alla centralina giusta; se quel percorso si interrompe, il sintomo può essere una spia, un messaggio sul display o un modulo non raggiungibile.
| Elemento | Funzione nella rete | Che effetto può avere un guasto |
|---|---|---|
| Centralina motore | Gestisce dati di combustione e attuatori | Spia motore, modalità degradata, dati incoerenti |
| ABS/ESP | Legge velocità ruota e stabilità | Spia ABS/ESP, assistenze disattivate |
| Quadro strumenti | Visualizza e traduce lo stato delle reti | Messaggi d’errore, lancette o display anomali |
| Gateway | Smista i messaggi tra reti diverse | Più spie insieme, moduli non comunicanti |
Quando uno di questi nodi smette di ricevere il dato atteso, la spia non è quasi mai casuale: sta segnalando un’informazione persa o non credibile. Da qui si capisce anche perché una diagnosi seria deve partire dalla rete, non dalla singola lampadina sul cruscotto.
Perché si accende una spia anche se il motore sembra normale
La parte che genera più confusione è questa: una spia non è sempre il segnale di un guasto meccanico. Molto spesso una centralina accende il warning perché manca un messaggio, il dato arriva fuori tempo o il valore ricevuto non è plausibile rispetto agli altri sensori. Se il motore continua a girare regolarmente, può comunque esserci un errore di comunicazione tra moduli, un problema di alimentazione o un sensore che manda numeri incoerenti e obbliga la rete a reagire.
| Sintomo | Cosa può significare | Primo controllo utile |
|---|---|---|
| Spia motore accesa | Dato motore incoerente, sensore guasto o messaggio non ricevuto | Lettura dei DTC e dei dati in tempo reale |
| Spia ABS o ESP | Problema sul modulo, sulla velocità ruota o sulla comunicazione | Tensione batteria, connettori, codici del modulo ABS |
| Più spie insieme | Possibile problema di alimentazione, massa o gateway | Fusibili, masse, umidità nei punti critici |
| Quadro strumenti intermittente | Caduta di tensione, contatto ballerino o rete disturbata | Cablaggi, connettori e stabilità della batteria |
Qui il termine da tenere in mente è DTC, cioè il codice guasto memorizzato in centralina. Io parto sempre da lì, ma senza fermarmi al primo codice letto: su una rete CAN, un errore può essere la conseguenza di un altro nodo che non comunica più correttamente. E proprio per questo ha senso guardare anche le cause fisiche che fanno saltare la comunicazione.
I guasti più comuni che disturbano la rete
Quando il CAN si comporta male, le cause più frequenti sono quasi sempre molto più banali di una centralina da cambiare. Batteria bassa, massa ossidata, infiltrazioni d’acqua, connettori sporchi, cablaggi schiacciati o accessori aftermarket collegati male bastano a far saltare la comunicazione. Nella pratica, la rete è sensibile soprattutto a ciò che altera alimentazione, continuità del doppino e terminazioni.
In molte reti high-speed il cablaggio è lineare e termina alle due estremità con resistenze da 120 ohm. A impianto spento, in parecchie auto si legge circa 60 ohm tra CAN-H e CAN-L proprio perché le due terminazioni sono in parallelo; se il valore è molto diverso, può esserci un’interruzione, un corto o una terminazione assente. È un controllo utile, ma io lo tratto sempre come un indizio tecnico, non come una sentenza, perché l’architettura varia da modello a modello.
- Alimentazione instabile: tensione bassa o alternatore irregolare possono far resettare i moduli.
- Masse degradate: una massa imperfetta crea disturbi e cadute di comunicazione.
- Cablaggio danneggiato: schiacciamenti, pieghe o morsicature interrompono la coppia twistata.
- Infiltrazioni d’acqua: umidità e ossido nei connettori alterano il segnale in modo intermittente.
- Modulo o transceiver difettoso: un nodo guasto può bloccare o sporcare l’intera rete.
Prima di toccare una ECU, però, vale la pena passare da una diagnosi ordinata, perché il CAN punisce gli interventi fatti “a sensazione”.
Come si diagnostica senza cambiare pezzi a caso
Il connettore diagnostico è il punto di accesso, non la soluzione. Di solito la richiesta passa dal gateway e raggiunge il modulo interessato, quindi una diagnosi seria deve guardare sia i codici sia la struttura della rete. Io seguo quasi sempre questo ordine.
- Leggere i DTC in tutti i moduli raggiungibili, non solo nel motore.
- Verificare batteria, alternatore, fusibili e masse prima di andare oltre.
- Controllare connettori, infiltrazioni e tratte di cablaggio vicino a gateway, plancia e vano motore.
- Misurare la resistenza della rete a quadro spento, sapendo che in molte architetture high-speed un valore vicino a 60 ohm è un buon riferimento.
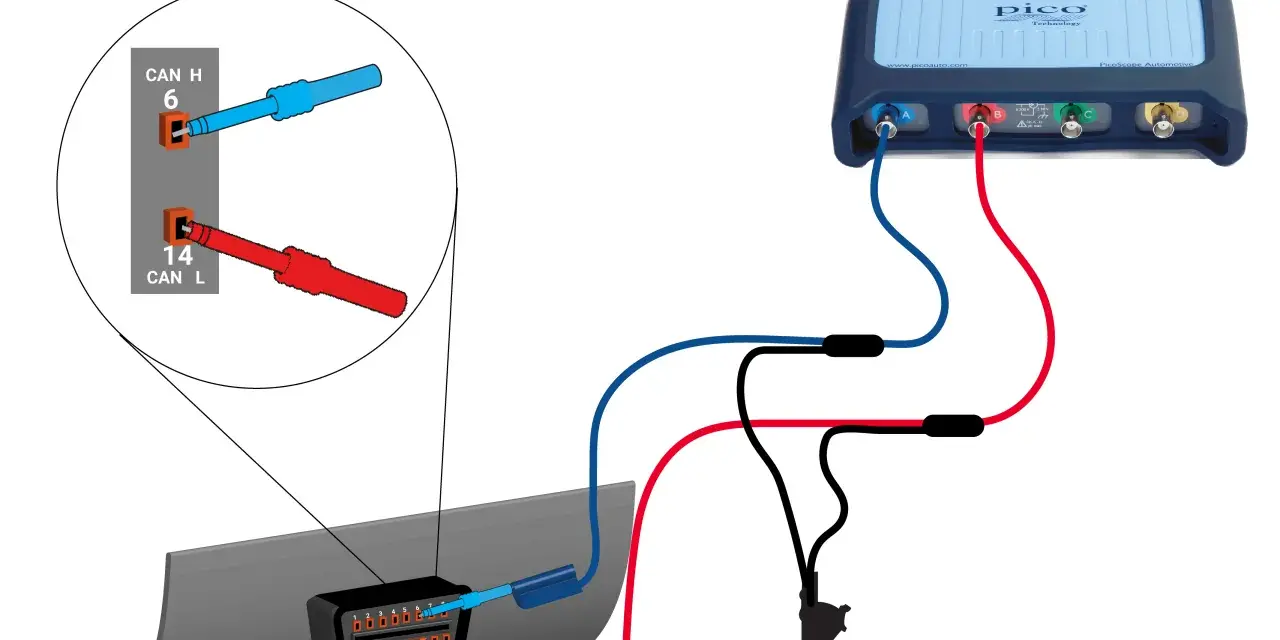
- Usare l’oscilloscopio quando il difetto è intermittente: il multimetro vede l’alimentazione, ma non racconta bene la forma d’onda.
- Isolare eventuali accessori aftermarket o moduli sospetti che potrebbero trascinare giù la linea.
| Strumento | A cosa serve | Limite principale |
|---|---|---|
| Lettore OBD | Legge codici base e dati essenziali | Spesso vede solo una parte del quadro |
| Tester diagnostico | Accede a più moduli e funzioni speciali | Richiede protocolli e copertura adeguati |
| Multimetro | Controlla alimentazioni, masse e resistenze | Non mostra disturbi rapidi del segnale |
| Oscilloscopio | Mostra la forma d’onda del bus | Richiede esperienza per interpretarlo bene |
Quando un guasto resta intermittente, questo passaggio fa la differenza: non stai più leggendo solo “cosa dice l’auto”, ma capendo dove il messaggio si interrompe. E questa logica diventa ancora più importante quando si lavora su architetture recenti, con reti diverse che convivono sulla stessa vettura.
CAN, CAN FD e l’auto moderna
Nel 2026 parlare di CAN vuol dire spesso parlare di una famiglia di reti, non di un solo protocollo. Il CAN classico resta diffusissimo nei sistemi di controllo; CAN FD aggiunge più capacità per frame e due velocità nella trasmissione; CAN XL porta il payload fino a 2048 byte e velocità fino a 20 Mbit/s, con un ruolo pensato per backbone e sub-backbone. Per chi fa diagnosi questo conta, perché non tutte le spie arrivano dallo stesso dominio e non tutte le reti si leggono allo stesso modo.
| Versione | Dove la incontro | Impatto pratico sulla diagnosi |
|---|---|---|
| CAN classico | Motore, body, telaio e funzioni di controllo | È ancora la base più comune e la più semplice da leggere con strumenti standard |
| CAN FD | Reti che devono spostare più dati senza cambiare subito architettura | La fase di arbitraggio resta fino a 1 Mbit/s, poi la data phase viaggia più velocemente |
| CAN XL | Backbone e sub-backbone nelle architetture più recenti | Payload fino a 2048 byte e fino a 20 Mbit/s, con strumenti e metodologie più esigenti |
Il punto non è inseguire l’ultima sigla, ma capire che le auto moderne mescolano più reti e più livelli di complessità. Se uno scanner vecchio legge la spia ma non riesce ad andare oltre, spesso non è l’auto a essere “misteriosa”: è lo strumento a non parlare bene la lingua della rete. E da qui conviene chiudere con la regola che, nella pratica, evita più errori di qualsiasi teoria.
La regola che uso per non inseguire false spie
Se devo lasciare una sola regola, è questa: una spia legata al CAN va letta come un problema di sistema, non come il colpevole finale. Quando si accendono insieme più avvisi, parto da alimentazione, masse, acqua e gateway prima di pensare a tre guasti separati.
Le diagnosi migliori non nascono dal cambiare un modulo alla volta, ma dal capire chi parla, chi tace e da dove il messaggio si interrompe. È lì che il CAN mostra il suo lato più utile: non solo racconta il difetto, ma aiuta a localizzarlo con precisione.